Onshape-to-robot documentation
What is this ?
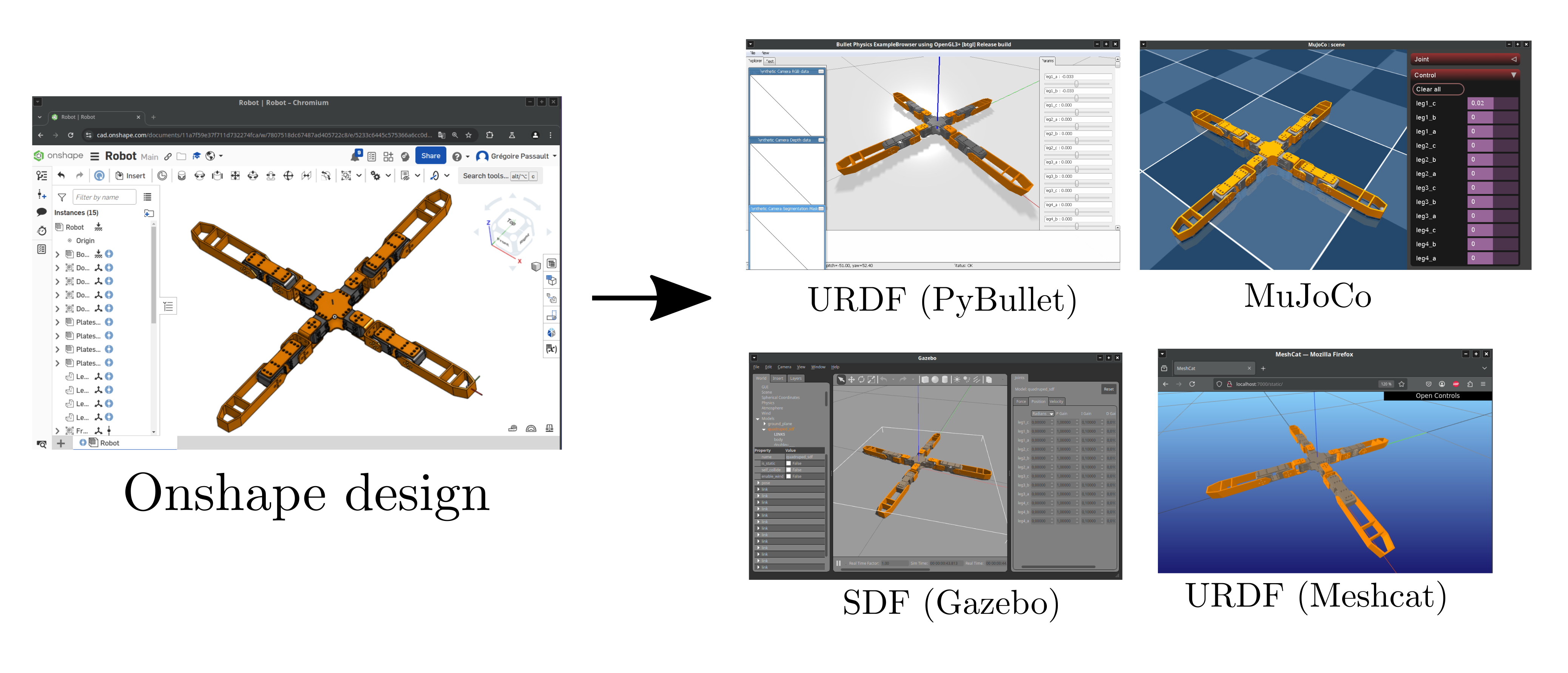
onshape-to-robot is a tool that allows you to export robots designed from the Onshape CAD software
to descriptions format like URDF, SDF or MuJoCo, so that you can use them for physics simulation or in your running code
(requesting frames, computing dynamics etc.)
video tutorial (some information may be outdated)